
具身机器人创新设计平台(增强版)GX-MAT-09S
工程级具身复合机器人设计套装,支持构建11种+7种机械臂,80余种复合机器人构型,采用12V编码直流电机,底盘负载可达25kg。控制涵盖Arduino、STM32、边缘计算板,支持多层级开发,涵盖了视觉、激光雷达等主流机器人传感器。适合开展专业创新实训。
适配人群/场景
高校机器人课程综合实践、研究开发、创新竞赛训练
核心亮点
- 11 种移动底盘 + 7 种机械臂,组合 88 种具身复合形态
- AI 视觉、语音、姿态、巡线、激光雷达等多模态传感融合
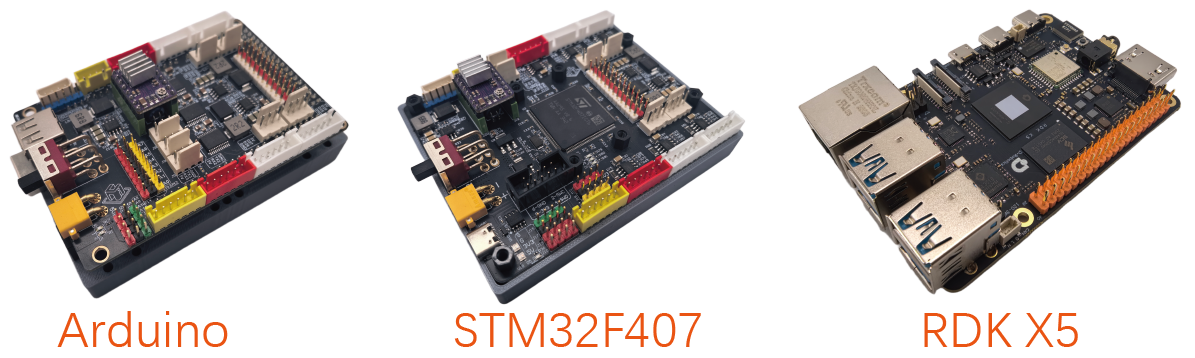
- Arduino + STM32 + RDK X5 控制体系覆盖入门到科研
产品特点
具身体系拆解
以具身移动复合机器人为蓝本,拆解本体结构、驱动与智能控制链路,帮助学习者理解具身机器人的关键要素与系统协同。
模块化学习路径
提供 11 种底盘、7 种机械臂与 88 种复合形态,支持从零件设计、装配到调参控制的完整项目式学习。
全域智能感知
融合 AI 视觉、单目摄像、AI 语音、姿态 IMU、避障/巡线传感器、导航激光雷达等单元,构建具身机器人必备的环境认知能力。
多层控制器架构
Arduino 图形化入门、STM32 单片机专业开发与 Horizon RDK X5(Ubuntu+ROS,10 TOPS)协同,兼顾教学、科研与产业级实践。
课程与竞赛覆盖
支撑《机械原理》《传感器检测》《单片机》《机器人学》《ROS》《移动机器人导航与定位》等课程,并满足高校智能机器人创意赛、工程实践创新赛等竞赛训练需求。
样机案例
平台提供具身机器人典型底盘与机械臂构型,可通过模块化装配快速构建 88 种具身复合机器人,覆盖差速、全向、转向、双臂等多种体系。
机器人底盘
机械臂构型
复合机器人
系统配置
传感器配置
平台集成具身机器人常用的多模态传感器,可完成环境感知、语音交互、导航与巡线等任务,为复合机器人搭建提供完整输入通道。
- AI 视觉摄像头
- 单目摄像模组
- AI 语音识别模块
- 姿态 IMU 传感器
- 避障/巡线传感器阵列
- 导航级激光雷达
控制器配置
控制系统采用 Arduino + STM32 + 地平线 RDK X5 三层架构:Arduino 提供丰富的 IO 接口与图形化/C++ 快速入门,STM32F407 适合专业单片机深入开发与嵌入式工程实践,RDK X5 预装 Ubuntu + ROS,搭载 10 TOPS 边缘 AI 算力,可运行 SLAM、视觉感知、具身大模型等高阶应用。三者协同,满足从基础教学到机器人科研的全流程需求。
软件配置
提供 Arduino IDE、STM32 开发环境、Ubuntu/ROS 工具链及配套示例,支持从硬件驱动到 AI/ROS 的全栈实践。
兼容主流开源框架与工具,包括 Arduino 库、HAL/FreeRTOS、ROS/MoveIt、OpenCV、YOLO、语音识别 SDK 等,可快速对接教学与科研资源。
实验项目
实验体系覆盖单片机、传感器、嵌入式、机器视觉、底盘设计、机械臂控制、复合机器人应用、ROS 以及移动导航定位等方向,提供由浅入深的完整项目路径。
电机综合项目
聚焦直流电机与舵机控制,结合编码器与 PID 算法完成精准调速。
- 控制直流电机:掌握直流电机的数字控制与驱动要点。
- 控制编码直流电机:采集编码器数据,理解 PID 原理,实现速度闭环控制。
- Servo 控制舵机:使用 myservo.attach()/write() 完成舵机角度控制。
传感器项目
涵盖 TTL、巡线、超声、陀螺仪、语音识别与 AI 视觉等常用传感器。
- TTL 传感器实验:掌握 TTL 传感器参数读取方法。
- 四路巡线传感器:实现机器人循迹控制。
- 超声测距传感器:理解测距算法并完成环境自适应调试。
- 陀螺仪传感器:使用 MPU6050.cpp 获取姿态信息。
- 语音识别传感器:调用 HBR640.h 完成语音识别与指令触发。
- AI 视觉传感器:掌握摄像头视频显示与 AI 视觉推理流程。
嵌入式项目
围绕 Ubuntu + Python 开发,训练 GPIO、传感器数据处理、多线程与 Web 联调。
- 系统基础入门:安装配置 Ubuntu,掌握 SSH 登录与文件系统管理命令。
- GPIO 接口控制:用 Python 控制 GPIO,实现 LED 与按键交互,熟悉标准库调用。
- 传感器数据采集:连接多类传感器,读取并处理数据,结合 GUI 展示与滤波校准。
- 网络通信与 Web 服务器:编写 Socket 通信,搭建简易 Web 服务实现数据交互。
- 多线程实现:使用 threading 模块完成多线程采集与处理,掌握同步与互斥。
机器视觉项目
依托 RDK X5 与摄像头模块,完成颜色、形状、二维码、云台追踪等应用开发。
- 视觉颜色识别:使用 OpenCV 进行颜色空间转换,完成分拣/追踪示例。
- 视觉形状识别:通过边缘检测与轮廓提取实现形状分类。
- 视觉二维码识别:基于 OpenCV/zbar 完成二维码解码与信息处理。
- 云台追踪几何图形:搭建云台系统,识别并跟踪特定几何图形实现闭环控制。
- 机器人追踪彩色目标:识别彩色目标并驱动移动平台实现自主跟随。
- 人脸识别:使用 OpenCV/dlib 进行人脸检测、特征提取与识别应用。
- 视觉巡线:编写视觉算法识别地面轨迹,实现视觉循迹。
- YOLO 部署:部署 YOLO 模型完成实时目标检测与分类。
- 数据集标注:使用 LabelImg/RectLabel 创建并管理自定义视觉数据集。
- 水果识别:在 RDK X5 上部署深度学习模型,完成实时水果识别。
- 机械臂识别搬运:结合视觉识别与机械臂控制,实现自动化抓取搬运。
底盘机器人项目
覆盖差速、全向、福来、麦轮、转向等多种底盘的装配、驱动与里程控制。
- 双驱差速三轮底盘设计:底盘组装、驱动控制、里程控制
- 后双驱四轮差速底盘设计:底盘组装、驱动控制、里程控制
- 双驱六轮差速底盘设计:底盘组装、驱动控制、里程控制
- 三轮福来轮底盘设计:底盘组装、驱动控制、里程控制
- 四驱四轮差速底盘设计:底盘组装、驱动控制、里程控制
- 四轮福来轮全向底盘设计:底盘组装、驱动控制、里程控制
- 四轮麦轮全向底盘设计:底盘组装、驱动控制、里程控制
- 四驱福麦全向底盘设计:底盘组装、驱动控制、里程控制
- 四驱独立转向底盘设计:底盘组装、驱动控制、里程控制
机械臂项目
从串联机械臂到 SCARA 与双臂系统,完成机构搭建与运动学控制。
- 串联四自由度机械臂设计:组装、驱动控制、运动学控制
- 串联五自由度机械臂设计:组装、驱动控制、运动学控制
- 串联六轴机械臂设计:组装、驱动控制、运动学控制
- SCARA 机械臂设计:组装、驱动控制、运动学控制
- 双臂机器人设计:双臂组装、驱动控制、运动学控制
- 升降双臂机器人设计:升降双臂组装、控制、运动学调试
复合机器人项目
基于不同底盘组合机械臂,快速构建具身复合机器人应用。
- 双驱差速三轮复合机器人:云台、SCARA、六轴等多类型复合形态
- 双驱四轮差速复合机器人:云台、四/五/六轴、双臂、双臂升降等组合
- 双驱六轮差速复合机器人:云台、四/五/六轴、SCARA、双臂、双臂升降
- 三轮全向复合机器人:云台、四/五/六轴、SCARA、双臂、双臂升降
- 四驱差速复合机器人:云台、四/五/六轴、SCARA、双臂、双臂升降
- 四轮全向复合机器人:云台、四/五/六轴、SCARA、双臂、双臂升降
- 四轮转向复合机器人:云台、四轴、SCARA 三种方案
机器人操作系统 ROS
面向 ROS 入门、功能包开发与 MoveIt 仿真,强化机器人软件能力。
- 体验 ROS 运行实验:理解文件结构,控制仿真小乌龟与移动机器人。
- 构建/移植 ROS 功能包:创建功能包、配置环境,并实现键盘控制移动机器人。
- URDF 仿真与 MoveIt 控制:构建 URDF 模型并在 Rviz 显示,结合 MoveIt 实现机械臂运动学控制。
移动机器人导航与定位
涵盖 Catgrapher、Hector、Gmapping 全流程导航建图实践。
- 快速导航体验:按流程操作 Catgrapher、Hector、Gmapping 并对比适用场景。
- Catgrapher 构建地图:讲解原理、拆解功能包、配置与全参调试。
- Hector 构建地图:拆解架构、配置参数、完成全参调试。
- Gmapping 构建地图:掌握原理、配置流程,完成全参调试与地图生成。
知识库
获取更多关于该产品的技术文档、使用教程及常见问题解答。
关键问题
问题 2:若高校需开展 ROS 与移动机器人导航课程,文档中哪些产品最适配,核心优势是什么?具身机器人创新设计平台(增强版)GX-MAT-09S便携式ROS导航机器人学习平台 UNI-WR2
答案:最适配的产品为便携式 ROS 导航机器人学习平台 UNI-WR2(0.45 万元)和具身机器人创新设计平台(增强版)GX-MAT-09S(3.88 万元),核心优势如下:
UNI-WR2:
• 部署灵活:极致便携(<13cm,<550g),最小 60cm×60cm 桌面即可实现 SLAM 导航,无需大型场地;
• 教学深度:将 ROS 工程化部署拆解为 5 步(原理→演示→框架解构→功能包配置→全参调试),结合 Cartographer / Hector / Gmapping 3 种导航方式,设计递进式实验;
• 成本友好:单价 0.45 万元,适合批量采购用于学生分组实验。
GX-MAT-09S:
• 功能全面:支持 ROS 课程,可搭 11 种底盘 + 7 种机械臂,结合激光雷达(测距 0.12-8m),覆盖移动机器人导航与定位实践;
• 算力支撑:配备 RDK X5 主板(10TOPS),预装 Ubuntu+ROS,支撑 SLAM 建图、自主避障等复杂算法的运行与调试。

