
具身机器人创新设计套装(四十合一)Ubot MR40
可从零搭建 40 种典型具身机器人构型,涵盖底盘、机械臂与复合机器人。支持图形化编程、C++(Arduino)与 Python 多语言开发,配套阶梯式课程资源,适合机器人启蒙、科创实践与竞赛训练。
适配人群/场景
K12、中职/高职一年级、大一学生
核心亮点
- 模块化自由搭建40种经典机器人构型
- 兼容图形化编程与C++/Python多语言开发
- 覆盖机器人启蒙、科创实践与竞赛训练
产品特点
编程方式
使用 Ubot MR40 不需要学习者具备编程基础。平台采用图形化编程方式,学生通过拖拽即可完成基础控制逻辑;对于具备一定基础的学习者,也支持使用 C++ 与 Python 进行更复杂、更专业的代码开发。
组装方式
我们对组装难度的考虑细化到每一个孔的设计,包括间距、尺寸、是否为螺纹孔,做到在保证强度的同时,尽可能减少不必要的螺母,降低组装难度,让学习者入门更简单且将学习的精力集中在整体设计中。
样机案例
样机采用模块化设计,机器人底盘构型基于差速轮模块、定向轮模块、万向轮模块、转向轮模块、全向麦轮模块、夹爪模块、摆动模块组合设计三轮双驱差速底盘、三轮双驱前轮转向底盘、四轮双驱差速底盘、四轮四驱差速底盘和四轮四驱麦轮全向底盘;机器人机械臂构型基于摆动模块、转台模块、夹爪模块组合设计云台、3自由度机械臂、4自由度机械臂构型。
机器人模块
机器人底盘
机械臂构型
复合机器人
系统配置
传感器配置
集成姿态检测传感器、4 路巡线传感器、2 个超声波传感器、语音识别传感器、喇叭模块与 PS 手柄遥控器,可实现自动避障、迷宫行走、自主倒车入库、自主巡线、语音交互与手柄遥控等功能。学生还可以基于 Ubot MR40 开展丰富的项目实践,例如模拟月面探测与科学考察任务。
- 六姿态陀螺仪传感器
- 四线寻路传感器
- 超声波传感器
- 语音识别传感器
- 喇叭模块
- 遥控手柄
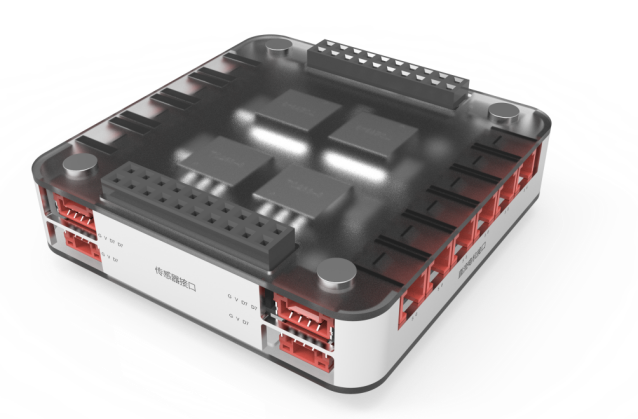
控制器配置
控制器支持常用的编程语言程序输入,包含图形化、C++、Python等编程语言编写程序。预留了丰富的接口,包含6路直流电机接口、8路舵机接口、4路超声波接口、4路巡线传感器接口、4路扩展IO传感器接口、USB串口等接口。控制器采用堆叠式设计,预留了对接扩展坞,方便用户将其他电子硬件与控制器进行连接使用。
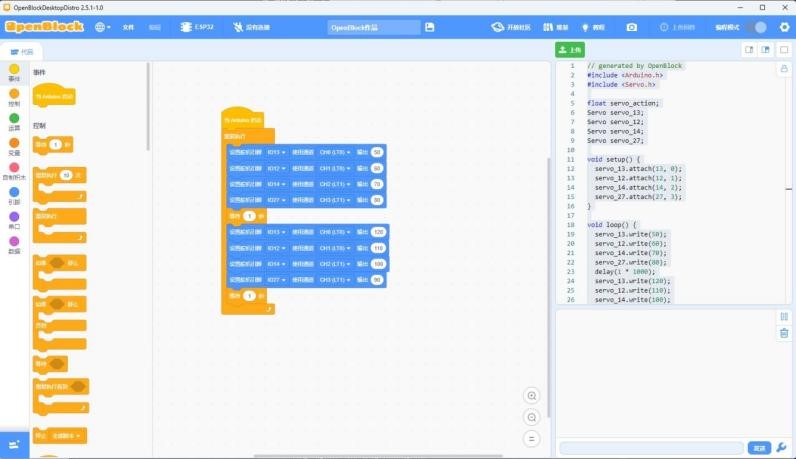
软件配置
软件集成OpenBlock编程软件,支持图形块编程和C++、Python代码编程,可以用于软件程序编程也可以对硬件设备编程,支持硬件代码生成及编译下载功能,同时也支持通过与硬件设备间的实时通讯实现的实时运行模式。
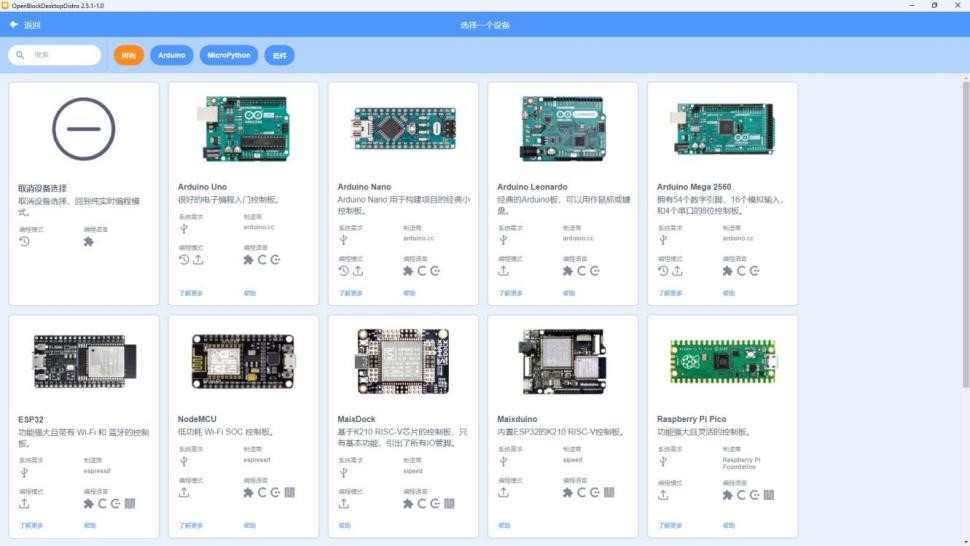
Openblock硬件生态完整,支持市面上通用的创客硬件平台,包括Arduino、MicroPython和ESP32,用户可以任意扩展。
知识库
获取更多关于该产品的技术文档、使用教程及常见问题解答。

